Unmanned Vehicles Help Scientists Reveal Shifts in the Arctic During ICEX 2020
Capt. Edward Lundquist
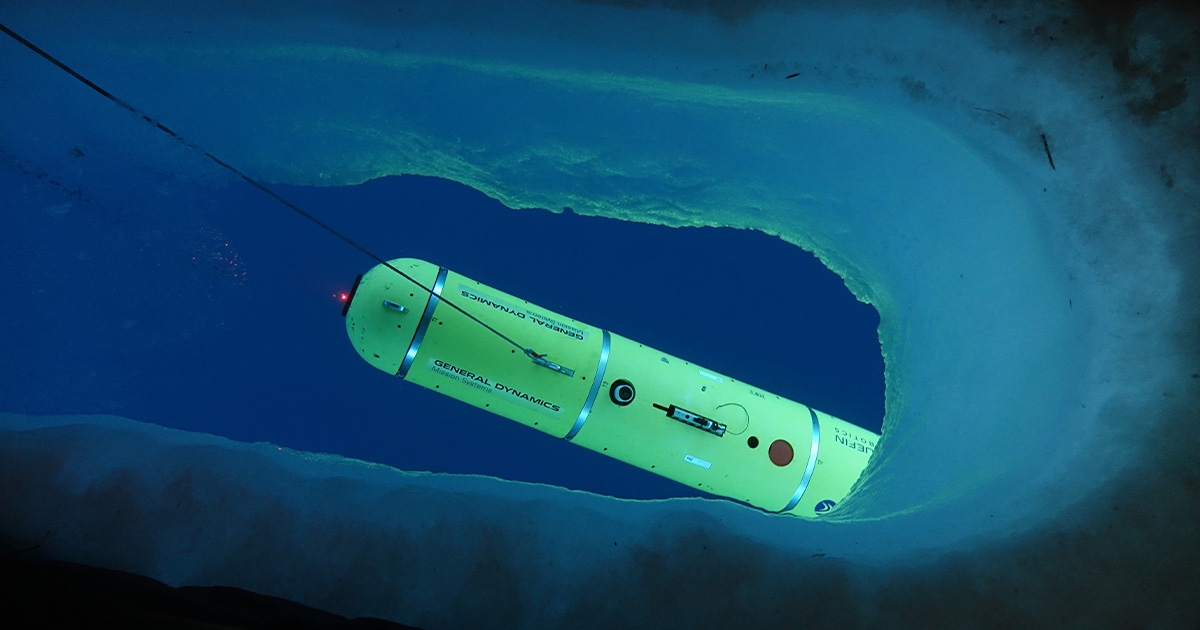
A Bluefin Robotics-built MACRURA UUV deployed in the Arctic. (Photo credit: MIT, General Dynamics)
The U.S. Navy and its NATO allies have long viewed the Arctic as a potential battlefield, especially for nuclear powered submarines that can safely and covertly maneuver under the ice for extended periods of time. Operating friendly submarines, and looking for enemy submarines, requires a foundational knowledge of the environment and how the dynamics work.
The Cold War ended, and the need to operate in the far north lessened. As scientists return to once again measure the ice, atmosphere and ocean, they have been startled to find that the knowledge they had collected and analyze in the past was no longer indicative of the Arctic of today.
“The environment is changing for anyone using underwater sound, whether it’s for navigation, communications, sensing marine mammals, it’s dramatically changing the way we can do things,” according to Prof. Henrik Schmidt of MIT. “That’s one reason why scientists and navies are interested again.”
U.S. NAVY’S ICEX 2020
One way to gather data and build experience in the region is the U.S. Navy’s biennial ICEX (Ice Exercise), which provides a unique opportunity for the military, academia, industry, partner nations, and other agencies and organizations to collect meteorological and oceanographic data on, above and under the Arctic Ocean. A major feature of ICEX is the building of a temporary camp on the ice, which is usually visited of one or more submarines. ICEX 2020 included a series of experiments that have been built upon previous testing, which involves the precise navigation of underwater vehicles operating under the ice.
Among the important tools for underwater sensing, construction and warfighting are Unmanned Underwater Vehicles (UUVs), which can conduct missions that are impractical otherwise. Some of the data cannot be gathered any other way and is critical to better understanding the long-term environmental changes in the air, ice coverage, and throughout the entire water column.
That’s why researchers from the Laboratory for Autonomous Marine Sensing Systems (LAMSS) at the Massachusetts Institute of Technology (MIT), the Navy’s Arctic Submarine Laboratory (ASL), Unmanned Undersea Vehicle Squadron One (UUVRON-1), and General Dynamics Mission Systems (GDMS) Bluefin Robotics brought MIT’s Macrura UUV to ICEX 2020 to refine navigation capability and improve situational awareness to better understand the Arctic undersea environment, and how is it different from the 1990s.
“Some of the data collected and reported by autonomous systems cannot be gathered any other way, and it helps us better understand the long-term environmental changes in the air, ice coverage, and throughout the entire water column,” said Schmidt.
Today, the water temperature at different depths has changed, so the sound propagation profiles are different, too. What was formerly solid ice is now much more dynamic. One of the limitations in the high north is the lack of land-based communications or satellite coverage.
Most UUV operations occur in open water, with direct communications by means of acoustics or surfacing and transmitting over a data link to the host platform or satellite. GPS provides precise position update, so the vehicle knows where it has been, so that it can mark a precise location for anything it has found. But when operating under the ice, getting a GPS update is problematic.
The precise position is important not only so the vehicle can return after a mission, but so that anything it has detected or observed can be reported with an accurate fixed location to provide appropriate context.
UUVS IN THE FIELD
The team developed an experiment involving an integrated communication and navigation-aiding framework known as ICEX tracking range—or icex-tracker. The experiment used a network of surface buoys equipped with small acoustic modems suspended beneath the ice which were linked by radio communications to the ICEX Camp Seadragon base camp. Submarines coming to the surface next to the camp used the buoys for positioning.
As a crewmember aboard USS Connecticut, Lieut. Cmdr. Dan Goodwin went up to the Arctic for ICEX 2018. A year later, he was selected for a graduate program jointly run by MIT and WHOI program in 2019, where he became part of Schmidt’s ICEX team, and found himself back in the Arctic and running experiments from Camp Seadragon.
“Our submarines use inertial navigation systems, so they know where they are when submerged. But subs need to get periodic updates, such as a GPS fix from a satellite. The same applies to UUVs,” Goodwin said.
Based on GPS satellite orbital inclinations, the 2020 Camp Seadragon was not so far north so as to completely lose GPS, but the GPS satellites don’t pass overhead above the Arctic Circle, so a fix is dependent on fewer satellites than normal.
“INS is very good at speed, heading, and pitch and roll, but sometimes you need something else to give a more precise location. For our unmanned vehicles, we normally use a Doppler Velocity Log (DVR) for measuring speed over ground, but the sea floor is still far away in most cases up in the Arctic unless you’re really close to the coast, so that was not an option. We reversed the DVR so it was pointing up to measure speed under the ice above. However, the ice is not fixed—it’s moving, too. The ice may only be moving at a knot—while the vehicle is operating at 3 or 4 knots—but that is not insignificant compared to the speed of the vehicle. There are currents, too, that may or may not be moving in the same direction as the ice. So, eventually we have some drift in the location of the vehicle.”
To help submarines safely surface next to the camp, a pattern of tethered communications modems is suspended under the ice.
“For ICEX 2020, our science team experimented with MIT’s Macrura, which is a General Dynamics Missions System Bluefin 21 UUV—to navigate precisely while conducting a submerged mission,” Goodwin said. “We used four buoys about 2,000 meters apart, the same buoys that the submarines used, with micro modems at both 30- and 100-meters depths to compensate for the temperature and salinity differences in the water that affect acoustic propagation. This allowed the UUV to adaptively switch between modems depending on the depth of the vehicle to ensure the most coherent acoustic communication. The travel time of those signals provided acoustic aided navigation for the UUV. The system was also able to compensate for currents, which can vary in in direction and intensity at different depths.”
“The quality of science conducted at ICEX is pretty revolutionary,” said Goodwin. “We were able to demonstrate under-ice navigation to near-GPS quality. The Macrura vehicle knew where it was, and we knew where it was. When we had an issue, we were able to go directly to where it was, cut a hole in the ice, and extract the vehicle.”
This story was originally featured in ON&T Magazine's February 2021 issue. Click here to read more.