The Future of Navigation
By Xavier Orr
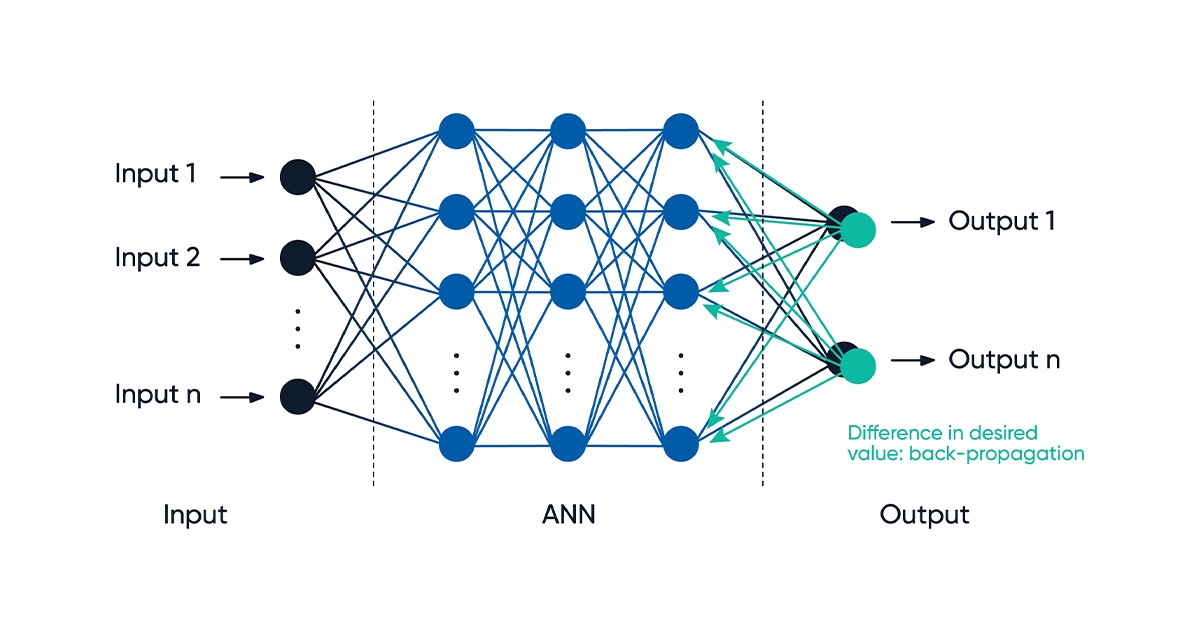
Image showing how back-propagation feeds into the ANN. (Image credit: Advanced Navigation)
Artificial intelligence (AI) and artificial neural networks (ANN) were conceptualized in the 1940s as automated systems inspired by the neural networks that constitute a biological brain. The system is based on “artificial neurons” that interconnect similarly to a biological system.
Each neuron can transmit signals to other neurons, making cross-connections possible and affecting how connected neurons interact.
ANN/AI systems are adaptive and predictive, based on neural interconnections. For example, previous data input, errors, corrections, predictions are recorded, analyzed, and compared with real-world data. The results are incorporated into interactions within the neural network to improve predictions and corrections. Effectively, the system can “learn” and apply this to its own operation.
Non-binary systems that impart “intelligence” have seen parallel development in other scientific areas. In 1960, mathematician and inventor Rudolf Kalman developed an algorithm that estimates unknown variables based on uncertain measurements. This is known as the Kalman Filter, which remains widely used in navigation systems, and uses current sensor readings and past estimations to provide predictions of the future system state.
CHALLENGES IN NAVIGATION
Modern navigation systems use multiple sensors to provide estimations of unknown variables. For example, GNSS provides location and velocity estimation, which are unknown variables, and the differential between satellite signal send-receive times are the measurements.
A major challenge to navigation is providing valuable estimations of hidden variables amongst uncertainty. For example, GNSS uncertainty depends on external factors, such as atmospheric effects and clock precision. Filtering, estimation, and correction using ANN processing is increasing precision inertial navigation.
HOW DOES AN ARTIFICAL NEURAL NETWORK OPERATE?
At its core, an ANN is able to “learn” from input, output, historical, and previously estimated data to calculate higher accuracy outputs over time. That is, storing previous estimates and comparing them to actual measured values, then adjust/respond/recalculate automatically to increase future precision. A typical ANN goes through two distinct phases, which remain in a cycle of continual refinement.
- Initial: Processing units within the ANN are “taught” rules that guide its outcome. These teach the system to recognize patterns in data by comparing actual output produced with the desired output.
- Secondary: Corrections that have been learnt (also known as back-propagation) are applied to the actual data to achieve the desired output.
DEEPER LEARNING THROUGH LONG SHORT-TERM MEMORY (LSTM)
Advanced Navigation solutions are based on the long short-term memory (LSTM) AI principle. This technique is well suited to classifying, processing, and making predictions based on sensor data. LSTM provides a processing layer that contains “memory cells”. These memory cells are interconnected in ways that allow fine filtering of data, based on recurrence and multiple other parameters, as the data is processed.
The following are some major advantages to LSTM:
- Context: The range of additional motion and time data that is collected over time and interleaved to create cross-connected filtering. The more important the filter is seen to be and the recurrence of it provides greater contextual “weight”. This “bigger picture” format provides additional elements into the signal processing that, when filtered correctly, provides greater prediction accuracy and resolution.
- Storage length: Memory cell contents are not discarded after a defined period like some other systems. Instead, the data context and recurrence determine retention duration. More frequent context and recurrence, the longer the data is valid.
- Learning and time lag handling: An LSTM offers better lag handling than standard recurrence based neural networks. Through forward and back-propagation, memory cells can be corrected as the system learns. Through learning and error correction, the LSTM can bridge lags and eliminate limitations of non-LSTM models that experience degradation of accuracy over time.
Advanced Navigation ANN uses three types of memory-based learning:
- Long-term: Logical and fact-based rules that are derived from laboratory testing are applied to input data at 1000 Hz. Processing is performed by the inference engine, which formulates decisions based on deep learning algorithms.
- Short-term: Applies a more constrained “medium” level learning that is used to update the inference engine model at 2 Hz.
- Deep: Re-models the system and applies more complex updates to the learned model, based on all sensor data, once per minute.
COMPARING MATHEMATICAL/STATISITCAL PROBABILITY FILTERING AND ANN
Two common errors are addressed during processing:
- Deterministic: Biases, scale-factor and non-orthogonal errors are inherent and known, so can be predicted precisely. Sensor calibration can eliminate deterministic errors and is applicable to both mathematical/statistical probability and ANN filtering.
- Stochastic: Instabilities and electrical noise errors are random, but may be analysed statistically, although difficult to predict accurately.
- Integrity monitoring: ANN integrity monitoring is superior to traditional filters as it identifies and rejects erroneous measurements and adjusts anticipated accuracy/inconsistency of inputs with a finer granularity. This is an advantage, particularly in conditions that may cause exaggerated variance input data, that can be difficult for traditional filters to handle without introducing errors.
- Vehicle modelling: Kalman filter-based systems typically use profiles that apply basic constraints on position, velocity, and acceleration. This results in vehicle modelling by typical motion. Contrastingly, ANN profiling applies more detailed dynamic motion model constraints. This allows for better error tracking and attenuation, more reliable data, and overall higher accuracy.
THE ADVANCED NAVIGATION ADVANTAGE
Developing a highly constrained ANN model that is tightly coupled to sensory hardware is extremely complex. The Advanced Navigation founders began this process in 2007 as university research to develop a highly constrained, custom neural network specifically for inertial navigation systems. This required extensive R&D and rigorous laboratory and field testing to build a substantial body of empirical data. This data was used to establish the required ANN learning patterns.
A PROMISING FUTURE
AI based on LSTM ANN architecture brings a new approach to inertial navigation applications and solves deficiencies using mathematical/statistical approaches. Using a software platform to perform multi-layer learning and processing allows for less hardware-intensive systems, higher update frequencies and less power consumption. This leads to a lower SWaP-C at each performance level.
For more information, visit: www.advancednavigation.com.
This feature originally appeared in Ocean News & Technology's Magazine December 2022 edition. To read more, access the magazine here.