Manned-Unmanned Teaming: The Use of Micro AUV By EOD Divers
RTsys
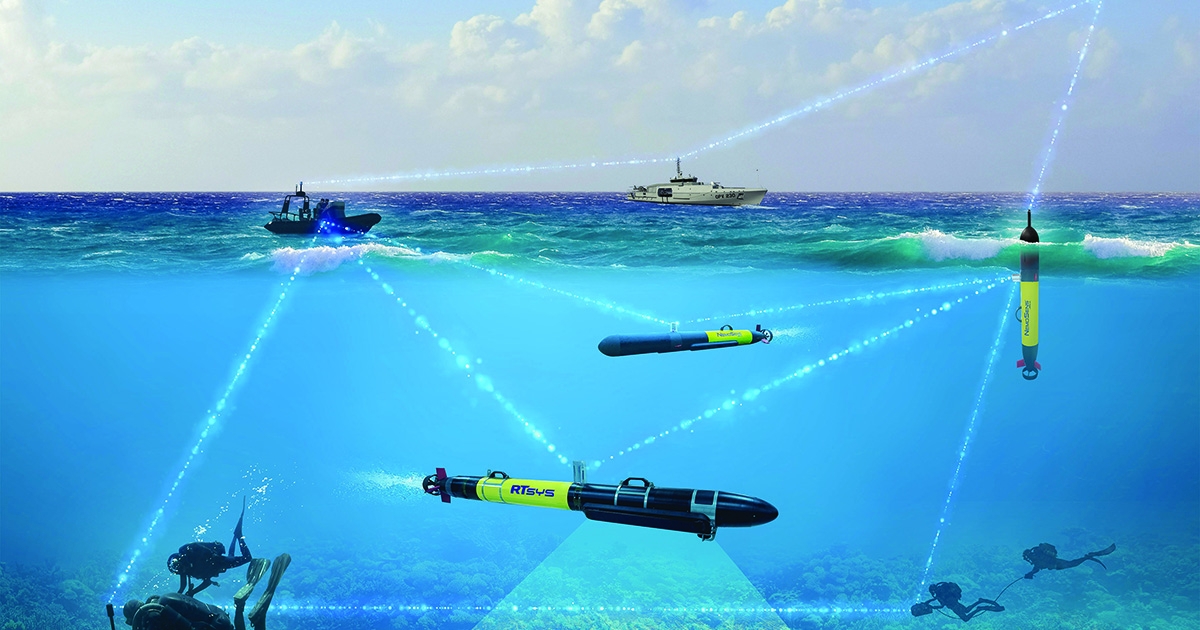
HERO: NemoSens fitted with DVL and 900 kHz Side Scan Sonar is the most requested configuration for SOF and EOD divers. (Image credit: RTsys)
Manned-Unmanned Teaming is the collaborative use of both manned and unmanned systems to achieve a common objective. In the context of explosive ordnance disposal (EOD) diving operations, Manned-Unmanned Teaming can be a valuable solution to enhance safety and efficiency.
Autonomous underwater vehicles (AUVs) were originally designed to carry out various subsea missions without the need for human intervention. And they have proven, especially among defence sector users, to be an invaluable tool. Equipped with different configurations of sensors, sonars, cameras, and other intelligence-gathering instrumentation, AUVs offer the most xxxxxxxx way to collect critical information about enemy activity, seabed terrain, and potential threats. Today, unmanned systems are commonly used to perform tasks that deemed too risky for human divers, such as searching for explosive devices in murky waters or in hazardous environments.
However, there are limitations. Manned EOD operations (i.e., divers) ensure the often necessary in situ human interpretation and real-time decision-making capabilities in situations where automated systems may prove lacking. EOD divers are also able to provide unmanned systems with physical assistance if required, such as the need to classify a detected mine or attach/remove an explosive device. In short, the presence of a human brings a second tier of intervention and assurance to complex operations.
AUV-ASSISTED DIVING OPS
By combining the strengths of trained divers and underwater robotic systems, Manned-Unmanned Teaming helps optimize the overall effectiveness of EOD diving operations while minimizing the associated risks to personnel in the water. It can also increase the speed of operations and reduce the overall cost of EOD missions. Such has been the rate of development of specialized AUVs, we have now reached a point where AUVs have become the most efficient tool for EOD divers to perform their operations more safely and effectively. Where once AUVs would work independently, deployed from a support vessel, and programmed to run a mission, they now offer a more complementary role to critical EOD operations.
This realization inspired the team at RTsys, a French producer of specialist AUVs and handheld sonars, to design and manufacture NemoSens, a micro AUV developed specifically EOD ops and other deployments by Special Operations Forces (SOF).
MINI BUT MIGHTY
NemoSens is a 300 m depth rated micro (less than 1 m in length) and highly portable (less than 10 kg in weight) AUV. Lightweight and modular, its open LINUX architecture allows users to develop their own navigation algorithm for greater flexibility and maximal use. Engineered for the precise identification and localization of underwater mines across large search areas, the AUV delivers ultrahigh accuracy positioning thanks to its acoustic communication system. This bundle of features makes NemoSens the ideal tool to provide specialist diving units with the necessary data to inform accurate and timely decision making in high pressured situations.
This “unmanned” part of the said “teaming” allows SOF and EOD diver units to extend their traditional scope of operations to include:
- Mine Countermeasure Missions (MCM)
- Very Shallow Water missions (VSW)
- Rapid Environmental Assessment (REA)
- Search And Locate (SAL)
- Search And Rescue (SAR)
- Amphibious and Beaching operations
- Harbor protection
- Intelligence, Surveillance, and Reconnaissance (ISR)
A key consideration surrounding the development of NemoSens was the AUV’s operational synchronization with SonaDive, RTsys’ diver-held sonar. This critical compatibility acts as a technical bridge in the Manned-Unmanned Teaming solution, resulting in a comprehensive and seamless network of equipment to safeguard and inform work carried out by SOF and EOD teams.
MCM ECOSYSTEM
The modularity and versatility of the RTsys MCM Ecosystem means that operators can use each device in the network as either a standalone piece of equipment or integral to the Manned-Unmanned Teaming system, with no need for recalibration at any time thanks to the embedded acoustic communication and repositioning of every module at sea.
Mission planning of this teaming solution (hand-held sonar and AUVs) is managed by one light and ruggedized programming and post-processing module, affording the operator maximum flexibility from projects anywhere around the world.
Real-time monitoring of the mission (including live underwater tracking of every asset) is available thanks to a Surface Communication Module and supported by a compact but robust waterproof touch pad.
To ensure positioning accuracy of the micro AUV NemoSens, as well as that of the EOD divers with and the SonaDive, RTsys has developed a unique underwater acoustic protocol called RACAM® (Repositioning And Communication Acoustic Module).
RACAM® is a lightweight and compact acoustic modem natively installed on every RTsys device. It allows for a coverage distance through Sparse-LBL over 2 km point to point and up to 5 km with relay beacon (underwater or surface buoy) and provides real-time information data points on equipment status, position, speed, heading, payload, depth, altitude, and distance from the Rhib.
This comprehensive RTsys Ecosystem offers the widest capability range possible, allowing operatives from navies around the world to leverage the operational benefits of using a Manned-Unmanned Teaming network.
To read the full product spotlight, which was featured in ON&T April 2023, click here.