July - Advancing ROV Productivity through Integrated Design
Ocean News
By: Peter MacInnes, VP Sales & Marketing, FMC Technologies Schilling Robotics
Theremotely operated vehicle (ROV) industry may be one of the few industries where the primary measure of operational performance is simply up-time, meaning the percentage of time is the ROV available to work. While this is of fundamental importance, the logical progression is to optimize utilization of the ROV for specific tasks and increase the overall productivity of subsea operations. Following several decades of technology advancement, the ROV industry now experiences a high percentage of up-time, commonly approaching 100%. This reflects a tremendous level of progress for an industry where up-time was probably below 50% only 30 years ago. As a parallel comparison, similar levels of progress have been experienced in other technology sectors such as automotive and consumer electronics. Over the years, the focus on product up-time (reliability) in these industries has transitioned to focusing on advancing efficiency since high reliability has progressed to the point of becoming an industry standard. As ROVs continue to develop an increasing role of importance, the subsea industry will follow a similar path as oil and gas operators focus on increasing efficiency while maintaining extremely high levels of up-time.
 Currently, the efficiency of ROV operations is dependent upon the skills of the ROV pilots, with all companies heavily relying on acquiring highly skilled personnel. These skilled personnel must not only have the unique skills to pilot the ROV but, in addition, the pilots are required to have advanced skills in maintaining mechanical, electrical, electronic, and hydraulic subsystems. Skilled pilots are also required to have comprehensive knowledge of offshore operations relating to construction, drill support, and IMR markets. The challenge of developing crews who are well trained and experienced in all of these skills is a major industry challenge, and experience in the offshore environment is the primary path to gaining the required knowledge. Obtaining this experience can take several years, which limits the number of highly qualified operators available. In order to advance the efficiency of ROV operations, the focus must transition from training pilots on how to be highly skilled technicians to becoming highly skilled operators. To enable this, the ROV itself has to become easier to maintain and operate. This is a fundamental design premise that occurs in all maturing product markets. For example, in consumer industries, the focus has evolved from which product offers high reliability to which product provides more benefits to the customer. This has been achieved through the advancement of integrated system design, while also developing more features that add value to the end user. The ROV industry has matured to a similar level where the focus on integrated design and beneficial features ultimately result in more productive operations for the oil and gas operator.
Currently, the efficiency of ROV operations is dependent upon the skills of the ROV pilots, with all companies heavily relying on acquiring highly skilled personnel. These skilled personnel must not only have the unique skills to pilot the ROV but, in addition, the pilots are required to have advanced skills in maintaining mechanical, electrical, electronic, and hydraulic subsystems. Skilled pilots are also required to have comprehensive knowledge of offshore operations relating to construction, drill support, and IMR markets. The challenge of developing crews who are well trained and experienced in all of these skills is a major industry challenge, and experience in the offshore environment is the primary path to gaining the required knowledge. Obtaining this experience can take several years, which limits the number of highly qualified operators available. In order to advance the efficiency of ROV operations, the focus must transition from training pilots on how to be highly skilled technicians to becoming highly skilled operators. To enable this, the ROV itself has to become easier to maintain and operate. This is a fundamental design premise that occurs in all maturing product markets. For example, in consumer industries, the focus has evolved from which product offers high reliability to which product provides more benefits to the customer. This has been achieved through the advancement of integrated system design, while also developing more features that add value to the end user. The ROV industry has matured to a similar level where the focus on integrated design and beneficial features ultimately result in more productive operations for the oil and gas operator.
FMC Technologies Schilling Robotics has leveraged this product design methodology, applying an integrated design approach to both the 150Hp HD and 250Hp UHD-III ROV systems. These systems have been developed not only to maintain high reliability standards, but to greatly simplify the operation and maintenance of the equipment. The UHD-III ROV builds upon the automated piloting features that originated with our StationKeep™ functionality that has been well proven over the last decade. The core stability and accuracy of this technology has enabled the development of additional Tool Dynamic Positioning (TDP) that provides simultaneous control of the ROV and manipulator to simplify the task of tooling intervention. Leveraging well-established principles of visual recognition technology, the ROV pilot can focus on inserting any tool, such as a hot stab, into the target intervention panel. The ROV and manipulator automatically maintain a relative position perpendicular to the intervention panel, which requires the operator to only manage three degrees of freedom for final tool positioning. This additional level of automated control greatly increases pilot proficiency, while also significantly reducing the time taken to complete the most common day-to-day intervention tasks. This brings a new level of consistency to the timeframe for performing frequent operations and is independent of the pilot's skill level.
 Beyond enhancements to the operational aspects of ROV control, maintenance processes have been simplified across all technical elements of the system. Through the elimination of many components resulting from integrated design, the result is a dramatic reduction in the time to perform maintenance. This typically reduces maintenance times by a factor of 6 to 1, meaning that a procedure that would normally be completed within 6 hours can now we achieved in less than 60 minutes. This is achieved by making the most critical subsystems available for rapid change-out on a modular basis, rather than a component level. This minimizes turnaround time on deck, resulting in higher system availability for operations.
Beyond enhancements to the operational aspects of ROV control, maintenance processes have been simplified across all technical elements of the system. Through the elimination of many components resulting from integrated design, the result is a dramatic reduction in the time to perform maintenance. This typically reduces maintenance times by a factor of 6 to 1, meaning that a procedure that would normally be completed within 6 hours can now we achieved in less than 60 minutes. This is achieved by making the most critical subsystems available for rapid change-out on a modular basis, rather than a component level. This minimizes turnaround time on deck, resulting in higher system availability for operations.
The ease of operation and maintenance are fundamental requirements to advancing the level of system productivity that can be achieved. Advancing the capabilities of the ROV to address industry needs is also necessary. Governing bodies are a fundamental driver of such needs and the recent requirements from API relating to Blow-Out Preventer (BOP) intervention. This new requirement has driven a core need for work-class ROVs to have sufficient power to actuate BOP shear rams to achieve closure of the well in less than 45 seconds. This industry regulation requires ROVs to provide fluid to actuate the BOP rams at a rate of 5,000 psi/50 gpm, which is significantly higher than any existing work-class ROV can achieve. FMC Schilling Robotics, therefore, developed the ISOL-8 pump in response to this need, and this custom designed pump is integrated to the UHD-III ROV. The ISOL-8 pump leverages the main 250-Hp motor to drive a series of eight bi-directional piston pumps that work in parallel to simultaneously produce the required pressure and flow. The compact design of the pump integrates directly above the main vehicle HPU, leaving sufficient space to incorporate up to 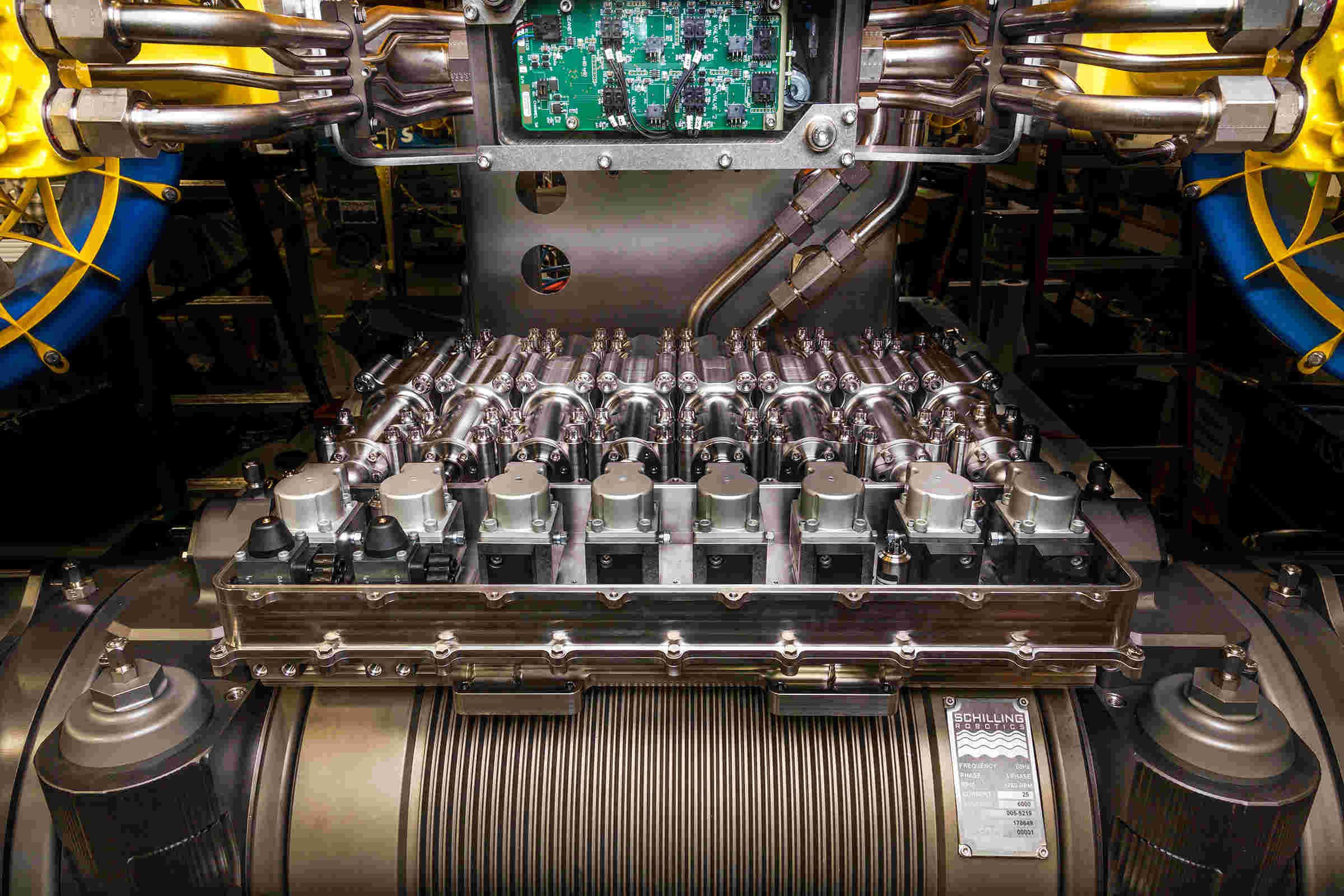 100 gallons of intervention fluid in a reservoir that can be mounted within the framework of the ROV itself (no additional skid required). By maintaining a compact overall design, the UHD-III can provide greater accessibility to subsea infrastructure. The ability to provide such high pressure and flow rates also opens up new market opportunities for work-class ROVs. Existing solutions to deepwater intervtion tasks such as hydrate remediation, well intervention, and connector actuation, can now be accomplished with the ROV at a far lower cost.
100 gallons of intervention fluid in a reservoir that can be mounted within the framework of the ROV itself (no additional skid required). By maintaining a compact overall design, the UHD-III can provide greater accessibility to subsea infrastructure. The ability to provide such high pressure and flow rates also opens up new market opportunities for work-class ROVs. Existing solutions to deepwater intervtion tasks such as hydrate remediation, well intervention, and connector actuation, can now be accomplished with the ROV at a far lower cost.
Overall, the benefits of an integrated product design, in any market, result in greater reliability and ultimately greater productivity. The deepwater work-class ROV industry continues to mature at a rapid pace, with ever increasing expectations of performance and flexibility. In addition, the rapid expansion of the global ROV utilization has placed significant pressure on the ability to supply sufficient experienced personnel. While training continues to be a critical element of developing advanced levels of competency, the advancement of ROV technology dramatically improves the ability of all personnel.