August Feature Story - FMC Technologies Schilling Robotics
Ocean News
Increasing Productivity, Decreasing Complexity
By: Peter MacInnes, Vice President of Sales and Marketing,
FMC Technologies Schilling Robotics

Work-class remotely operated vehicle (ROV) systems routinely perform hundreds or even thousands of intervention operations around the world every day. The vast majority of these tasks require the use of the ROV’s manipulators to interface some form of intervention tooling, such as a hot stab or torque tool, with a subsea intervention panel. The art of precisely controlling both the ROV and manipulator arm requires careful coordination between the ROV pilot and manipulator operator (co-pilot). In recent years, the task of piloting the vehicle has advanced with the development of station-keeping technology; however, the control of the manipulator has always required a very high degree of skill to articulate all six degrees of freedom to accurately position the tooling deployed by the manipulator. Schilling Robotics is developing software tools that aid the subsea manipulator operator while accomplishing specific common tasks quickly and efficiently as well as with improved safety and a lower risk of equipment damage. This article describes the development and deployment of operator-assisted capabilities for common subsea tasks that currently require a high level of operator skill and often take significant time to execute.
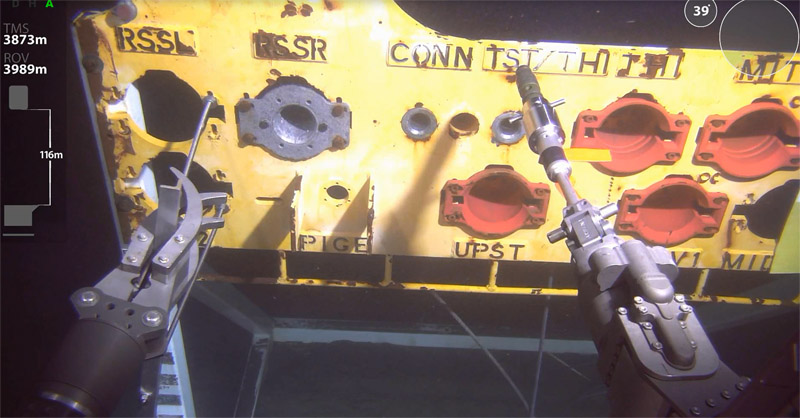
Typical hot stab panel for subsea equipment.
Over the last three years, FMC Technologies Schilling Robotics has endeavored to simplify the control of the manipulator so that the operator can focus on completing the tooling intervention task more efficiently. To achieve this, the method of controlling the manipulator had to become much more intuitive. As with other modern machine-based tasks, fully automated control would be the most efficient outcome possible, but the application of this is limited to highly repeatable tasks in a controlled environment. Subsea intervention presents a wide range of environmental and situational challenges that require the operator to make cognitive decisions that address the unique elements of each task. Providing the manipulator operator with a more efficient control solution that enables them to easily focus on interfacing the tool with the target is therefore key to enhancing the efficiency of such operations.
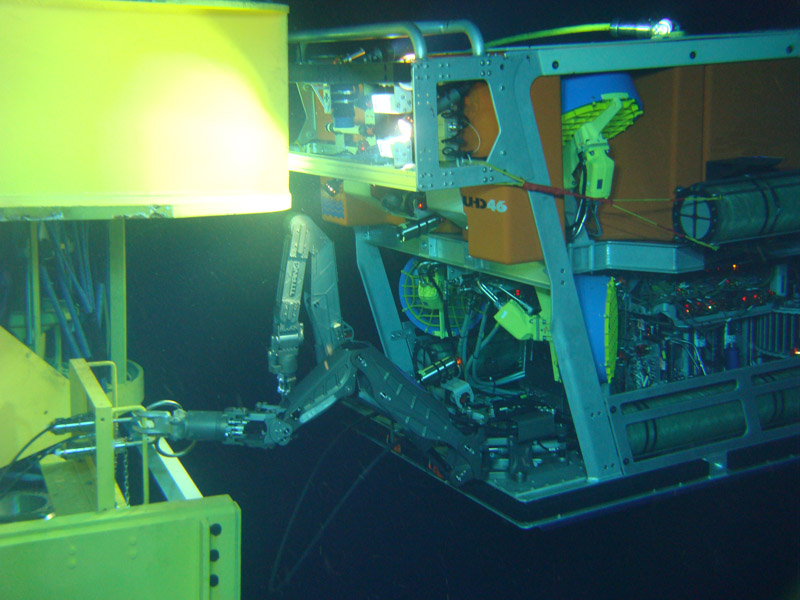
Schilling Robotics’ UHD-II ROV at work.
Tool Dynamic Positioning controller functionality.
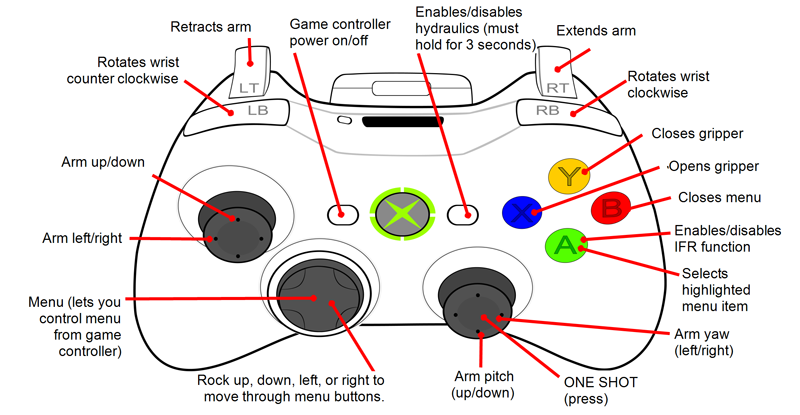
Development efforts focused on enhancing the operation of the TITAN 4 manipulator, which has become the industry standard for performing subsea intervention. Instead of controlling each individual joint on the arm, the concept of Cartesian control was applied, resulting in an intent-based control solution, or essentially tool dynamic positioning. Software development now enables users to move the arm in Cartesian space along the X, Y, and Z axes at the tip of the intervention tool. Using a simple game console controller, the operator is responsible for translation of the TITAN 4, while the onboard control system maintains alignment with the intervention panel. Reducing the degrees of freedom that have to be controlled by the operator and allowing the user to focus on intuitive three degrees of freedom spatial control environment results in dramatic efficiency improvements. During automatic alignment, a machine vision system uses images from on-board cameras to determine the orientation of the panel relative to the ROV. Manipulator control is then shared between the operator and the on-board computer control system; while the operator manually controls the manipulator tip position, the manipulator control system maintains a perpendicular orientation with the panel, leaving the operator free to execute the required task (such as inserting a hot stab) without having to simultaneously maintain alignment, which improves operator precision and reduces execution time. These options include:
- First person: Manipulator movement is relative to the manipulator wrist camera (called “camera frame”). This works best if you are driving the tool by looking at wrist camera video.
- Third person: Manipulator movement is relative to the ROV frame. (For example, “forward” moves the gripper forward relative to the ROV frame.)
- Hybrid joint: Moves shoulder, elbow, and pitch together in combination for up/down and left/right movements. Best for gross manipulator motions.
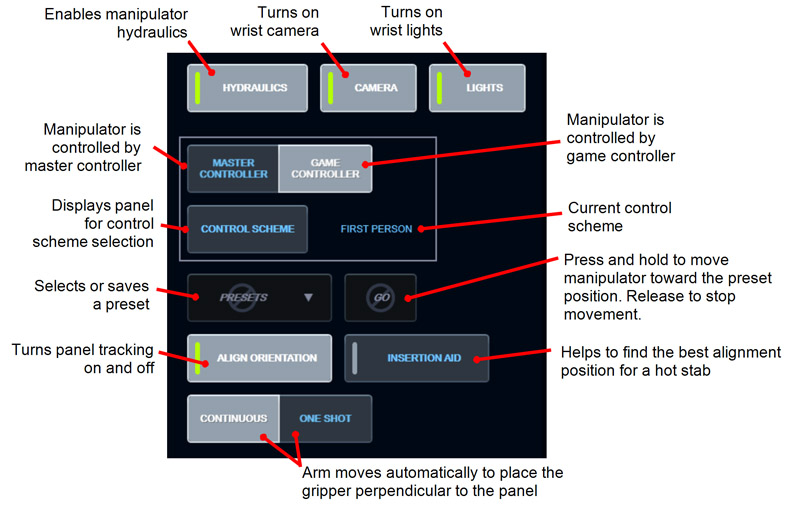
Schilling Robotics’ Hammerhead Pilot Console user interface.
Providing this level of flexibility allows users to adapt to specific situations and apply the most appropriate control solution.
The fully integrated Cartesian Control solution has been embedded into the UHD-III Hammerhead control system to provide a highly integrated user experience, similar to what would be experienced with any modern industrial machine. This results not only in the best system performance of the machine itself, but it also results in the best user experience and enhances the skills of every pilot. Although extensive testing has been conducted both onshore and offshore, the final version will be utilized offshore on customer projects during the remainder of 2015 to fully qualify the system.
Further advancements to the system will include integration with Schilling Robotics’ high-definition video system and vision recognition software. These vision-based features will further enhance ROV system productivity by reducing the time needed to perform any intervention task.