Forssea Robotics’ Smart ROV for Plug & Play USV Interfacing
Ocean News
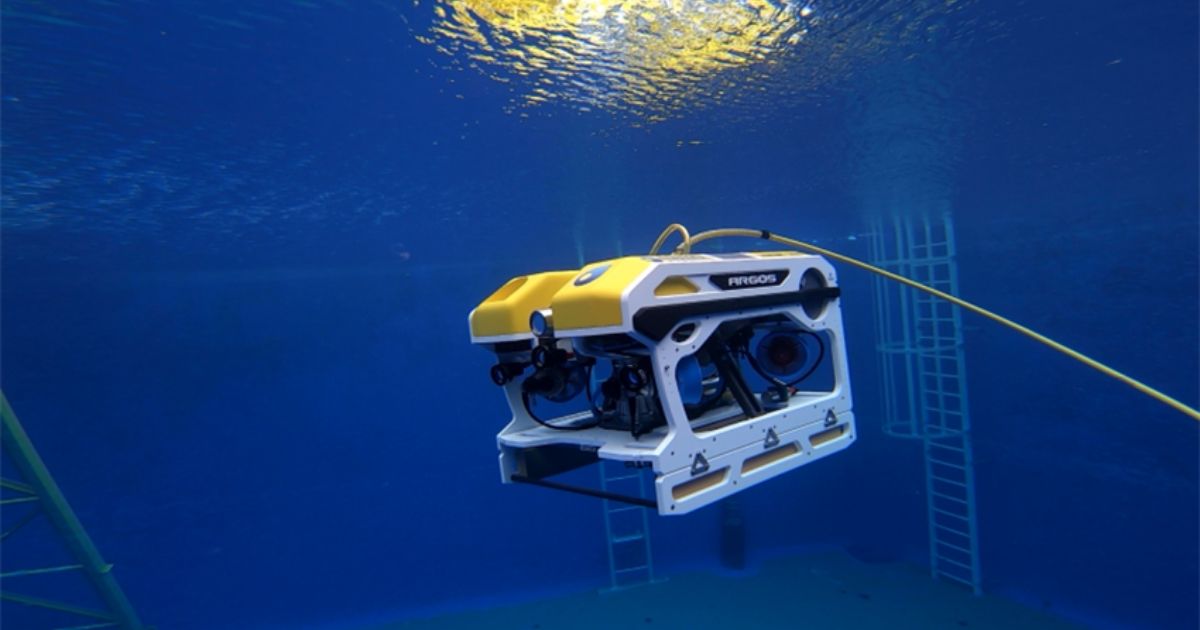
Photo credit: Forssea Robotics
The standard ARGOS version currently comes with “smart” piloting modes including latency management, auto-diagnosis features, dynamic positioning which is based on visual, acoustic and/or Inertial Navigation System/Doppler Velocity Log (INS/DVL) sensors and GO-TO features.
 Visual docking can be used to safely dock the ROV back inside its Tether Management System (TMS) especially in challenging weather conditions.
Visual docking can be used to safely dock the ROV back inside its Tether Management System (TMS) especially in challenging weather conditions.
In addition to the Smart Piloting modes of ARGOS, the base system is supplied with a Transmission Control Protocol/Internet Protocol (TCP/IP) surface control unit and therefore is perfectly adapted to be installed on an Unmanned Surface Vessel (USV) with the capacity to perform either full autonomous operations or through the use of remote piloting from an on-shore control center.
Gautier Dreyfus, CEO of Forssea explains, “We believe that the home for resident ROVs is not the seabed but USV. The requirements are similar: long immersions cycles and all electric design to reduce maintenance, supervised piloting mode with low latency, and autonomous features to deal with communication loss and pre-programmed operations such as pipe survey or asset inspection”.