Changing the ROV Game with the SRS FUSION and Linden’s STFOC
Ocean News

Underneath the surface of our vast oceans, lakes and rivers there is a world as foreign to most as that of a far flung planet in a distant galaxy.
 Yet this is a world that is being explored around the world by an army of robotic vehicles. Commonly referred to as Remotely Operated Vehicles (ROVs) or Autonomous Underwater Vehicles (AUVs), these robotic explorers come in many shapes and sizes and are specialized for the tasks at hand. Ranging from small inspection class vehicles to giant work class behemoths, each of these specialized machines are specifically designed to meet the operators’ needs. But why shouldn’t an underwater vehicle be more versatile? Why can’t it serve a multitude of functions? Can’t it be ROV and AUV all in one?
Yet this is a world that is being explored around the world by an army of robotic vehicles. Commonly referred to as Remotely Operated Vehicles (ROVs) or Autonomous Underwater Vehicles (AUVs), these robotic explorers come in many shapes and sizes and are specialized for the tasks at hand. Ranging from small inspection class vehicles to giant work class behemoths, each of these specialized machines are specifically designed to meet the operators’ needs. But why shouldn’t an underwater vehicle be more versatile? Why can’t it serve a multitude of functions? Can’t it be ROV and AUV all in one?
This is exactly what the Fusion from Strategic Robotic Systems out of Redmond WA does. It is a first of its kind hybrid underwater vehicle featuring Multi-Beam side scan sonar, USBL & GPC Positioning, HD video, Laser Line Scaling and wifi.
SRS has chosen Linden Photonics’ neutrally buoyant STFOC as the tether of choice for Fusion when in ROV mode.
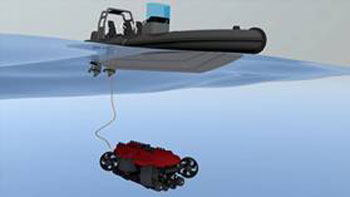
Remotely Operated Vehicle Mode
The FUSION ROV system provides real time sensor feedback to the surface by means of a small diameter tether. SRS has chosen a specialized buoyant STFOC cable from Linden Photonics for the FUSION tether. This 1.9mm tether is a highly flexible buoyant design with a tensile strength of 250 lbs. Linden’s tether technology includes a patented hermetic inner jacket that protects the critical fiber optics. ROV mode allows for the same level of autonomy as AUV mode, but with the benefit of live data transmission.
Highly maneuverable and stable with the six-thruster configuration and optimized mechanical design. The powerful thrusters and clever control system provide precise maneuverability in demanding conditions all with minimized drag influence from the small tether. FUSION comes standard with a 500-meter tether or an optional 2,000 meters to extend the range capabilities in ROV mode.
Autonomous Underwater Vehicle Mode
FUSION can be used as a fully autonomous vehicle that can be programmed to conduct a wide range of missions using the array of onboard imaging sensors.
Accurate data collection is possible with FUSION’s high accuracy navigation sensors including Doppler Velocity Log, Attitude Heading Reference System, Altimeter, Global Positioning System, Ultra Short Baseline system, Pressure sensor and Temperature sensor. When the FUSION is operating in AUV mode the USBL positioning system allows the FUSION to conduct large area search missions without resurfacing and with great accuracy and reduced mission time.
IVER Navigation & Propulsion Mode
Expanding on the multi-mode capability of the FUSION is the ability to use the vehicle as a navigation and propulsion vehicle for divers. The quick addition of the Diver Module to the rail system on the FUSION provides divers with a large format screen, menu buttons and thruster control.
Tied into the core of the FUSION system the diver module seamlessly accepts data collected during AUV or ROV missions including waypoints. Divers are able to use the FUSION to navigate to predetermined waypoints using the onboard navigation sensors as well as real time correction through the USBL. For low visibility operations, the high resolution forward looking sonar provides long range detection capability.
For more information on SRS
For more information on Linden Photonics