Joint Subsea-Surface Survey Operations Demonstrated
Ocean News
The ability for multiple unmanned subsea and surface systems to work together on joint survey missions, controlled from shore, has taken a step closer to operational reality following a two-week trial in Scotland’s Loch Ness.
The demonstrations were the culmination of the three-year Autonomous Surface and Sub-surface Survey System (ASSSS) collaborative project, led by ASV Global with partners Sonardyne International Ltd., the National Oceanography Centre (NOC) and SeeByte Ltd., supported with funding from Innovate UK and the Defence Science and Technology Laboratory.
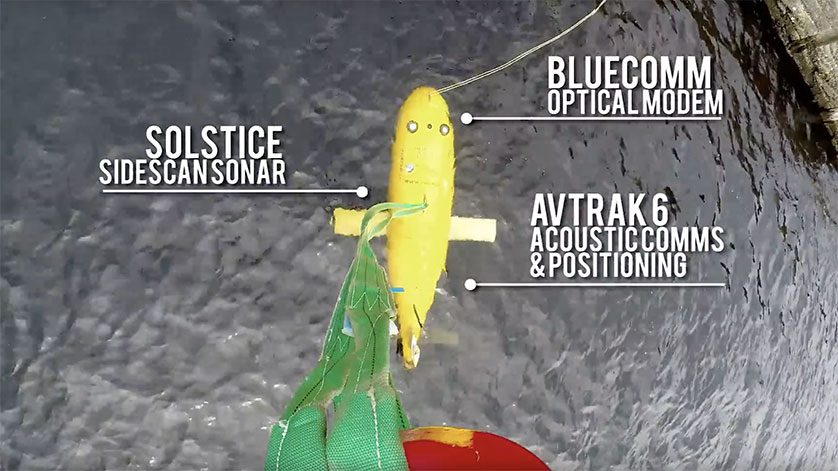
During trials in and on the loch, Sonardyne International Ltd.’s USBL acoustic positioning and AvTrak telemetry systems enabled ASV Global’s C-Worker 5 unmanned surface vessel (USV) to locate, track and command and control the NOC’s Autosub Long Range (ALR). The mission also included, for the first time, through-water optical transfer of data collected by a Sonardyne Solstice multi-aperture sonar on the ALR to the USV using Sonardyne’s BlueComm optical modem.
Watch the video here.
For more information, click here.