AROBOTNX ACTK - V1.1 (MOOS-IvP with ACTK) - Simulation Tool
Ocean News
As Offshore World is heading towards remote and autonomous operations, Simulation is very critical to identify the different risk associated with the operations, vehicle, and sensor payload.
![]() AROBOTNX brings in a real-time offshore environment through simulation with lessons learned from offshore Experience, Remote Learning from OEM, and a dedicated team of professionals who vision offshore as the core environment where many unexpected things can happen.
AROBOTNX brings in a real-time offshore environment through simulation with lessons learned from offshore Experience, Remote Learning from OEM, and a dedicated team of professionals who vision offshore as the core environment where many unexpected things can happen.
Importance of Simulation for Offshore Operations!
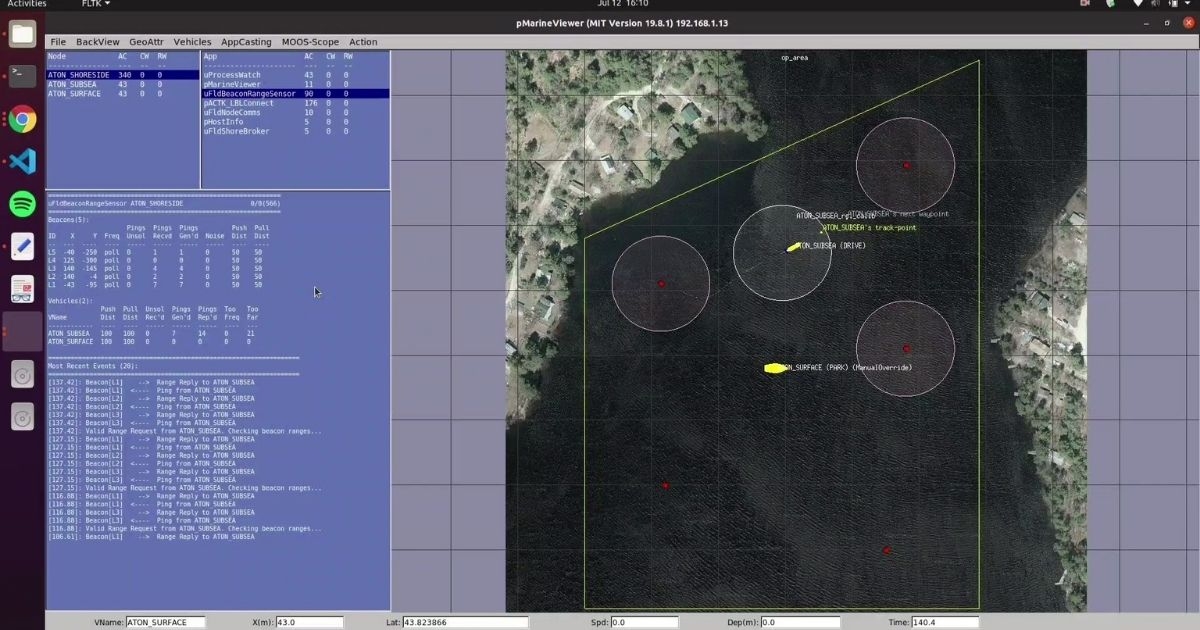
Running simulated real-time missions with a subsea positioning system enables better visualization and operational understanding of the vehicle, Navigation sensor payload, and environmental limitations.
AROBOTNX’s tool showcases the capabilities of Autonomous vehicles on a mission at surface & water depth with 'n' transponders to provide the acoustic ranges for vehicle positioning and on the other hand with fewer transponders and INS, Sparse LBL Array delivers Subsea SLAM solution.
ACTKV1.1 delivers use case of Multi-Vehicle Operations for Subsea operations accompanying with LBL transponders deployment, Calibrations, and Tracking with Mission Plan and Operation region.
Multi-vehicle simulation is to understand the exact scope, different risks, and unexpected failures based on sensor values with inter-vehicle communication for Collision avoidance based on the Collision Regulations (COLREGS).
AROBOTNX would like to thank the MIT Department of Mechanical Engineering (MechE), the Center for Ocean Engineering, a part of the Laboratory for Autonomous Marine Sensing Systems (LAMSS), and Oxford Robotics Institute for an excellent open-source contribution, MOOS-IvP (www.moos-ivp.org)