By RBR
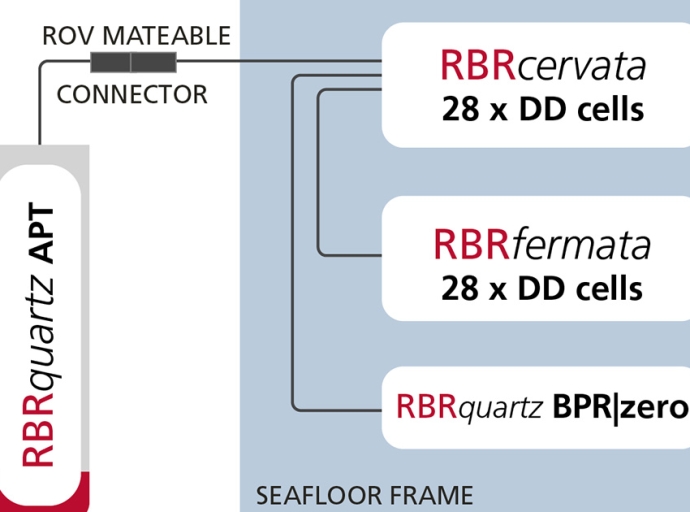
In 2021, RBR and Ocean Networks Canada (ONC) collaboratively designed and deployed a suite of instruments tailored to long-term and remote seismic research. This system is serviceable by remotely operated vehicle (ROV) while deployed, addresses instrument drift internally, can be deployed individually or integrated into a cabled array, and is entirely monitored by a portable data controller and power hub.
By RBR