January Editorial Focus - Landers Technologies
Ocean News
FREE VEHICLES: Lander Technologies Mature
By: Kevin Hardy, Global Ocean Design, San Diego, CA
Deep ocean free vehicles — untethered unmanned craft designed for deep ocean research and observation — were first proposed in 1938 by Maurice Ewing, Lamont Observatory, and Allyn Vine, Woods Hole Oceanographic Institution, in their paper “Deep Sea Measurements Without Wires or Cables” published by the American Geophysical Union. Free vehicles are released from a surface vessel and weighted to descend straight down. They may be ballasted to float at some mid-water depth or continue to the seafloor as far as 11 km away. At the conclusion of the mission, a drop weight is released and the free vehicle floats back to the surface. Ewing and Vine understood the numerous advantages of such a vehicle, many of which remain true today. With that paper, free vehicles became a topic of interest that continues to this day.
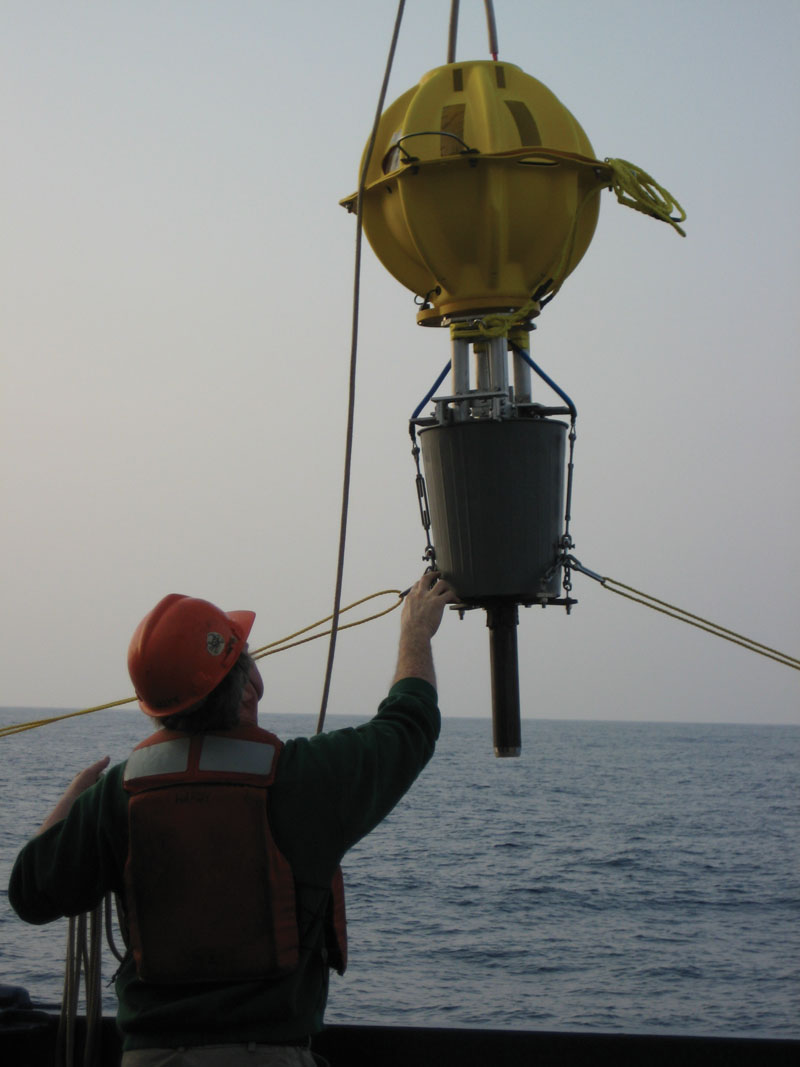
The author and DOV Karen, a free vehicle carrying a modified Moore corer, on deployment in the Philippine Sea, 2011.
Sediments with active biota were recovered from 5.7 km.
We have learned a few things since 1938, and literally thousands of free vehicles have been placed into operation, generally optimized for a specific task.
Free vehicles are unmanned underwater vehicles in every sense of the word. Expanding uses include exploration, science, research, and environmental monitoring.
Free vehicles are the most cost-effective way to get to midwater or benthic locations. They can carry traps, samplers, and sensors. They can travel to any depth and remain for short periods of time or up to multiple years. They can be released with countdown timers, acoustic command, galvanic time releases (GTR), or by a pre-programmed event trigger. Operations may be conducted on smaller charter vessels from ports close to the site of interest, freeing explorers from the significant cost and scheduling issues of dedicated oceanographic vessels. Some are small enough to be lifted with one hand from the ocean, but strong enough to journey to the bottom of any ocean trench. Small free vehicles with no HazMat have been flown overnight on passenger aircraft to remote destinations. The deepest places in the Atlantic and Pacific are close to American Trust Territories, Puerto Rico, and Guam, respectively, simplifying U.S. Customs approval. Free ascent vehicles may be integrated into larger bottom platforms, providing the option of interval recovery of a back-up data recorder without disturbing the primary science platform.
Free vehicles complement the other classes of undersea vehicles: remotely operated vehicles (ROVs), gliders, autonomous undersea vehicles (AUVS), mid-water floats, towed platforms, and manned submersibles. Each has a distinct suite of strengths and weaknesses. Component technologies such as batteries, glass spheres, syntactic, cameras, and lights may be tested prior to installation on the other classes of undersea craft using a robust, cost-effective free vehicle. Some samplers, such as drop arms with baited traps, sediment samplers, time-lapse photography, or stitched panoramic views of a site are best done with a lander. Sitting stationary on the seafloor, landers are absolutely quiet, allowing recording of ambient sound fields. Long-term monitoring of the environment is possible with low-cost systems that are cost-effectively deployed. Ocean engineers and marine technicians gain valuable experience, confidence, and competence in training with deployments of free vehicles.
Thanks to generations of engineers, technicians, scientists, government leaders, and commercial enterprise, free vehicle technologies have come a long way. Today, project leaders have many options in vehicle design unimagined even a decade ago. Though not exhaustive, some of the most important advancements made include those described below. Frames can be made from many new materials, such as pultruded FRP, structural 6061 Al shapes, and several new engineering plastics such as water jet cut Polyethylene and HDPE. Pyrex glass spheres provide both buoyancy and housing while large portions of the EM spectrum pass right through the glass. Flotation was once limited to bags of kerosene, but today includes large glass spheres and cylinders, syntactic foam, and even large styrene trawl floats for continental shelf depths. Commercially available underwater cables and connectors provide convenient interoperability of many subsystems.
Battery power in the form of Lithium and Lithium Ion in its many forms have immense energy density with none of the temperature sensitivity. Even Alkaline cell chemistries have been improved, providing higher energy densities and lower operating temperatures than in the past. Acoustic command and control systems are readily available that provide high-level commands for ranging, release, or a suite of system control and interrogation commands using a subset of ascii character codes. Sensors are evolving and shrinking rapidly, as are microcontrollers, microcomputers, and data storage units.

DOV Patty, suspended over Agana Harbor, Guam, prior to deployment in the Sirena Deep of the Mariana Trench in 2011. In this scalable design, the upper sphere contains the acoustic command/control system plus surface recovery beacons. A second sphere is added to offset the weight of the lower payload pod.
Side panels provide mounting surfaces for sensors and an external back-up timer.
Imaging systems are riding the consumer wave and providing very capable high-definition, low power, low light sensitivity, high-capacity still and video cameras. Samplers retain their familiar look. Surface recovery beacons include the tried and true RDF transmitter and light strobe, while Iridium and Argos provide limited two-way communication with a vehicle on the surface while sitting at a desk. A new Beacon Board (Global Ocean Design) provides a hybrid system where the free vehicle finds its surface position from a satellite, then radios that position omni-directionally on a VHF frequency for the ship to receive up to 8 mi away. The captain is provided a precise range and bearing to the lander, appreciated in all weather conditions.
There remain lifetimes of advances still to be made. Global Ocean Design (San Diego, California), makers of free vehicle component technologies, and Nautilus Marine Service (Buxtehude, Germany), makers of deep ocean 10-in. and 17-in. hollow glass spheres are collaborating to create a commercial line of landers expected out in spring of 2015. It is believed a worldwide opensource user group, similar to Arduino, will push the rate of development and adaptation faster.
A selection of important and historic reprints on free vehicles, some of them cited in this article, can be found on the Global Ocean Design website www.globaloceandesign.com/referencelibrary. html.
A through-hull underwater switch, seen on the left, activates a Beacon Board inside the 17-in. sphere as the free vehicle approaches the surface. The handheld unit on top of the hardhat receives the transmitted location from the Beacon Board and computes the range and bearing to the free vehicle, rain or shine, light or dark.
Today, the list of advantages to free vehicles, first assembled by Ewing and Vine, includes some newer additions:
1. Less specialized equipment is required on the ship.
2. A less specialized ship-of-opportunity may be found in a smaller harbor closer to the point of interest, during a more advantageous time, at a more modest cost, making a larger pool of ships available.
3. A long, undisturbed placement of recording instruments on the bottom can be done for basic research or environmental monitoring.
4. Bottom contact, an on-board countdown timer, an acoustic signal from the surface, or a galvanic time release (GTR), can be used to trigger the anchor release.
5. Once a free vehicle is deployed, the ship is free to move to another position to deploy another free vehicle, allowing the survey of a large area in the shortest period of time, using any vessel to best advantage.
6. Instruments or samplers can be placed at nominal horizontal separations or heights off the bottom. In the future, the adaptation of “smart bomb” guidance techniques will improve targeting.
7. Free vehicles can operate to the maximum ocean depths.
8. Shipboard operators can follow the vehicle’s transit down or on return using sound ranging.
9. The anchor ballast is hung below the free vehicle and left behind, minimizing the danger of being stuck in the mud or rocky clefts.
10. A basic lander design can be modular and scalable, configured to whatever ship-of-opportunity that presents itself: small vessel – small lander; large vessel with deck machinery – larger lander.
11. Like a pick-up truck in the deep sea, landers can carry interchangeable or multiple payloads. If the payload fits within defined physical, weight, electrical, and control parameters, it can be confidently delivered to anywhere in the ocean, controlled, and recovered.
12. Free vehicles may be used as test beds to validate operation of components or subsystems for other vehicles or for future use on landers.
13. A lander has persistence and can remain on the seafloor for an entire year or longer if needed. The lander can be used to lure animals towards it using bait. Scavengers come for the bait, while predators come for the scavengers. Low-light cameras using red LEDs can image animal behavior without disturbance or await the arrival of an ROV or manned submersible.
14. Landers can precede a manned submersible or ROV operation to initially survey a specific area of interest, perhaps finding a “hot spot” among many potential dive sites.
15. A shipment of lander components can fly from point-of-origin to point-of-operation, often on commercial passenger craft, then be assembled pier-side or in a warehouse.
16. Only scrap iron is needed for anchors, so the ballast weight may be purchased in the port of operation, paying scrap prices and saving the cost of shipment.
17. Landers represent disruptive ocean technology in that they are simple and robust enough to be used by any size institution. Their use in the ocean at any depth provides long-term observational or sampling capability. Institutions can assign the maintenance and operation of landers to their marine technicians, developing a ready field crew capability.
18. Student projects are readily adapted to Landers, providing new ideas to principal investigators while training a new generation of scientists and engineers.
19. An educated hunch may lead to a lander deployment in an unsurveyed area. A first-time visit often provides new observations that lead to new hypotheses. Challenging new deployments, say in the South Sandwich Trench, bring focus to opportunities for incremental improvement in technology.
Imaging systems are riding the consumer wave and providing very capable high-definition, low power, low light sensitivity, high-capacity still and video cameras. Samplers retain their familiar look. Surface recovery beacons include the tried and true RDF transmitter and light strobe, while Iridium and Argos provide limited two-way communication with a vehicle on the surface while sitting at a desk. A new Beacon Board (Global Ocean Design) provides a hybrid system where the free vehicle finds its surface position from a satellite, then radios that position omni-directionally on a VHF frequency for the ship to receive up to 8 mi away. The captain is provided a precise range and bearing to the lander, appreciated in all weather conditions.
![]()
A through-hull underwater switch, seen on the left, activates a Beacon Board inside the 17-in. sphere as the free vehicle approaches the surface. The handheld unit on top of the hardhat receives the transmitted location from the Beacon Board and computes the range and bearing to the free vehicle, rain or shine, light or dark.
There remain lifetimes of advances still to be made. Global Ocean Design (San Diego, California), makers of free vehicle component technologies, and Nautilus Marine Service (Buxtehude, Germany), makers of deep ocean 10-in. and 17-in. hollow glass spheres are collaborating to create a commercial line of landers expected out in spring of 2015. It is believed a worldwide opensource user group, similar to Arduino, will push the rate of development and adaptation faster.
A selection of important and historic reprints on free vehicles, some of them cited in this article, can be found on the Global Ocean Design website http://www.globaloceandesign.com/reference-library.html