April Feature Story - Lockheed Martin Corporation
Ocean News
AUV-Based Structural Integrity Management for Deepwater Fields
Driving Down Costs; Improving Safety and Performance
By: John Jacobson and Dan McLeod, Lockheed Martin Corporation
In the current economic environment, oil & gas operators are demanding steep reductions in operations and maintenance (O&M) costs and dramatic improvements in operating efficiencies to achieve viable financial returns on their deepwater field operations. Autonomous Underwater Vehicles (AUVs) hold the potential to meet this challenge through cost-effective deployment of advanced subsea sensor, navigation, and communications technologies. But while technology breakthroughs continue to occur at an incredible pace, critical technology gaps remain. Rapid adaptation and integration of these evolving technologies is a huge challenge for AUV developers, who are tightly constrained by payload, energy and hydrodynamic packaging considerations.
Today, O&M costs for structural integrity management in deepwater fields are driven by the use of high-powered work-class remotely operated vehicles (ROVs) and tether management systems deployed from large, high-specification ROV support vessels (ROVSV). ROV systems employed for deepwater facilities inspection typically include launch & recovery system, winch and umbilical, and operations and support vans that can easily total 75 to 90 tonnes on deck. When coupled with a dynamically positioned ROVSV with adequate deck space and crew accommodations, O&M costs can easily exceed $150,000 per day and require a crew of 35 to 50 offshore personnel. In addition, ROV umbilical and tether management in high sea state and currents can create hazardous conditions for both shipboard and subsea equipment.
In the future, AUVs will offer significant improvements in safety and operating efficiencies as well as substantial reductions in cost over current inspection methods. They will be deployed from smaller vessels, employ smaller crews, and ultimately operate from field resident subsea docking stations, thereby reducing the number of people at sea and reducing or eliminating the number of vessel days required. Because AUVs are inherently faster and more stable platforms than ROVs, they are capable of deploying a wide range of sensor technologies (including video, sonar, laser, ultrasonic, magnetic, and others) and collecting higher quality data at much higher rates.
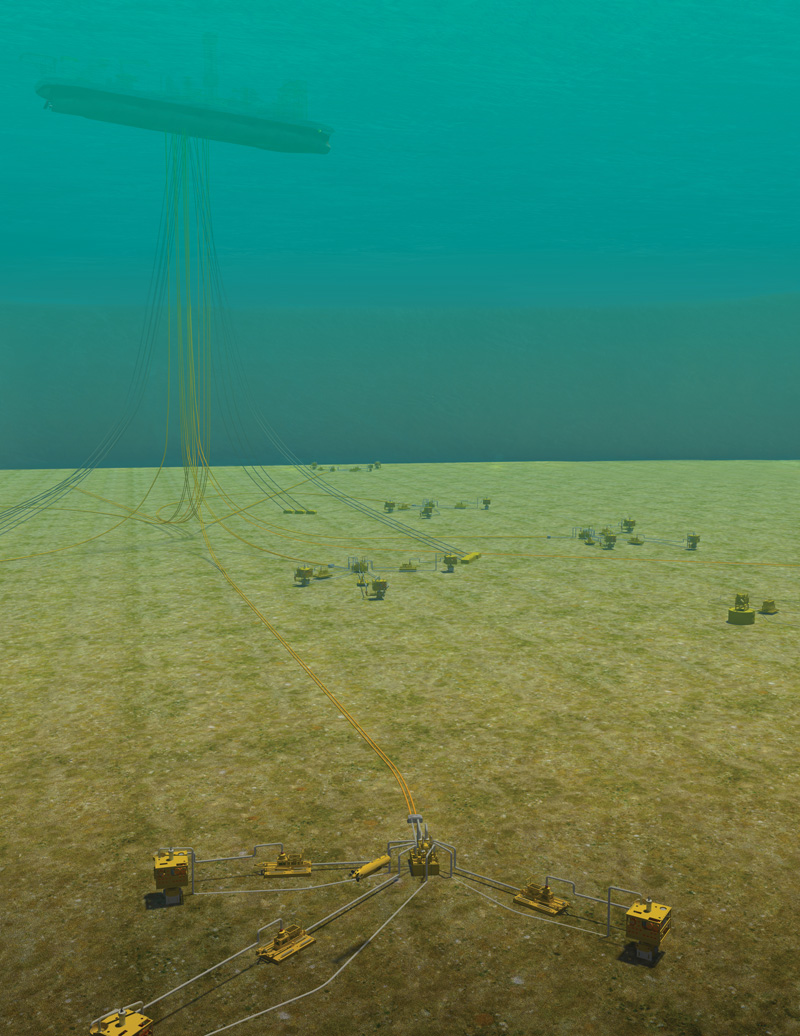
When all these advantages are combined, missions such as deepwater pipeline inspection can be accomplished by AUVs at rates 2 to 4 times faster than ROVs and result in cost savings approaching 50% to 70%. As AUV dynamic mission planning, deepwater navigation, and on-board data processing technologies improve, there is also high potential to substantially reduce the time and costs associated with post-mission data processing. The end result will be a potentially dramatic reduction in O&M costs and improvements in operating efficiencies. Ultimately, AUVs will become “field resident,” residing on the seabed in subsea fields for months at a time, providing a persistent presence to monitor structural integrity conditions and potentially saving field operators millions of dollars per year on O&M costs through reduction or elimination in vessel days.
AUV pipeline inspection can achieve cost savings of 50% to 70% over ROV inspections.
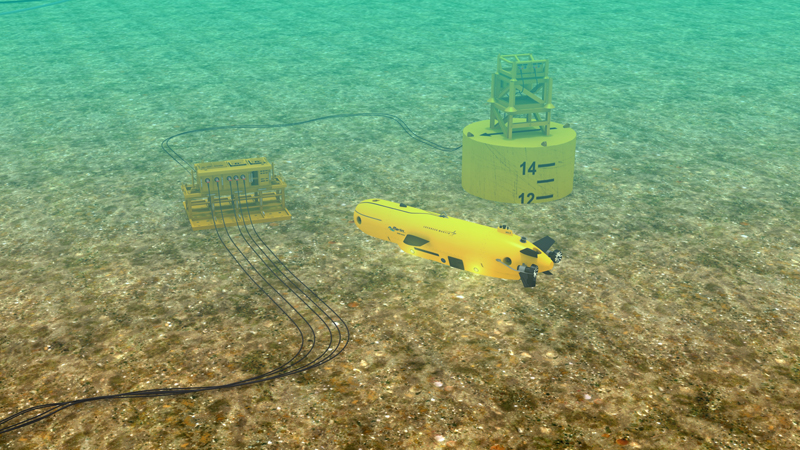
Field resident AUVs will provide a persistent presence to monitor structural integrity conditions and potentially save millions of dollars per year in O&M costs.

High bandwidth through-water communications using Free Space Optical technology will enable video transmission and tetherless control of AUVs for inspection and light intervention operations.
In order to achieve this vision for AUV-based structural integrity management, a number of mission-critical capabilities must be developed, demonstrated, and qualified for use in or near subsea production facilities. These include:
- Dynamic mission planning: Autonomous perception of the environment and autonomous mission re-planning in response to real-world changes to the environment and AUV faults;
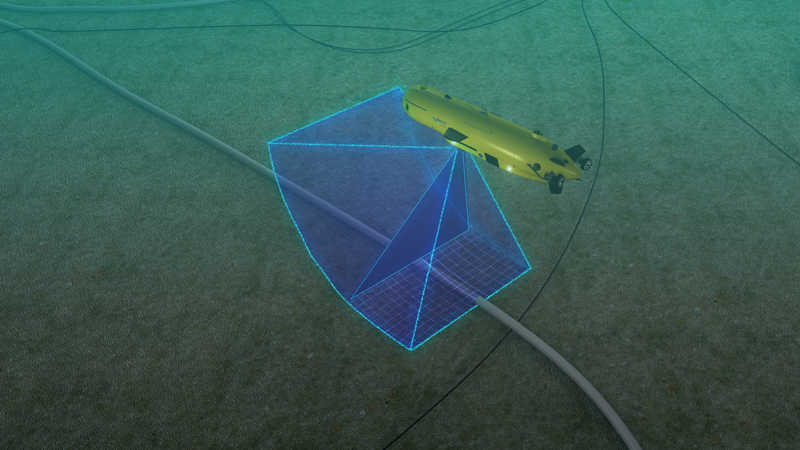
- Deepwater field navigation: Navigating safely and accurately for many tens of kilometers while maintaining precise positional awareness, avoiding known and unknown structures, and arriving at designated destinations within acceptable navigational error parameters;
- Close-in navigation: Precise positioning and feature-based navigation to achieve “close-in” subsea equipment inspections;
- Seabed and structural inspection using video, sonar, laser, photogrammetry, CP, NDT, etc.;
- Pipeline/flowline tracking, following and inspection while maintaining IHO survey standards;
- Riser/mooring line inspections;
- Hydrocarbon leak detection, classification and localization;
- High bandwidth through-water communications, enabling “Wi-Fi” capabilities such as wireless video transmission and tetherless control of AUVs for inspection and light intervention operations;
- Data harvesting from embedded sensors;
- Subsea docking, wireless power and data transfer; and
- Long-term submersion.
Many of these individual mission capabilities have been demonstrated by AUV developers in laboratories, test tanks or at offshore test facilities up to Technology Readiness Level (TRL) 3 to 5 (refer to API RP 17N). A critical challenge, however, is to deploy a mature, mission-capable AUV that integrates existing, field-proven capabilities while also providing adequate flexibility and growth to rapidly adopt new technologies that enable additional mission capabilities and provide additional step jumps in the AUV value proposition.
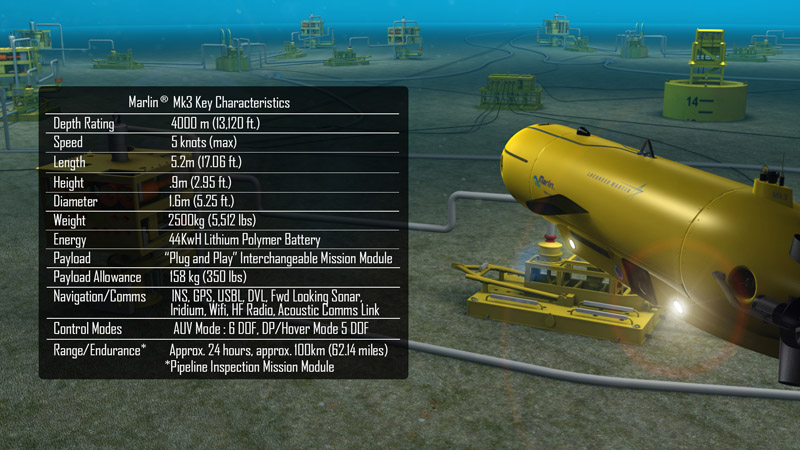
In response to this challenge, Lockheed Martin has developed the Marlin® Mk3 AUV, featuring “swappable” mission packages and a modular architecture that enables rapid implementation of evolving sensors, energy, communications and autonomy technologies to deliver value-driven solutions for deepwater structural integrity management. Designed to perform autonomous survey and inspection operations in water depths up to 4,000 m, the Marlin® Mk3 employs dual control modes (DP/hover mode, AUV mode) that enable close-in inspection with full hover capability as well as efficient, high-speed survey operations. The Marlin® Mk3 will conduct high accuracy navigation in and around deepwater oilfield production facilities using map-aided, terrain aided, and feature-based navigation and will conduct seabed and infrastructure survey and inspection using a wide range of “plug-and-play” acoustic, optical, and environmental sensors and tooling.
The Marlin® Mk3 will employ high-resolution 3D sonar and/or 3D laser sensors and Lockheed Martin’s field-proven, proprietary real-time model building algorithms to conduct structural inspections, generate geo-registered 3D models, and detect and localizing structural changes against a reference model. When these modeling techniques are applied in-situ to the seabed and field infrastructure using survey data collected and models generated on prior inspections, the result is the ability to identify changes in structural integrity conditions “on the fly,” and to autonomously re-plan the mission to collect additional data on the anomalous condition. In addition, upon completion of the mission, the AUV operator will be provided with immediate notification of potential structural integrity issues that were detected on the survey mission.
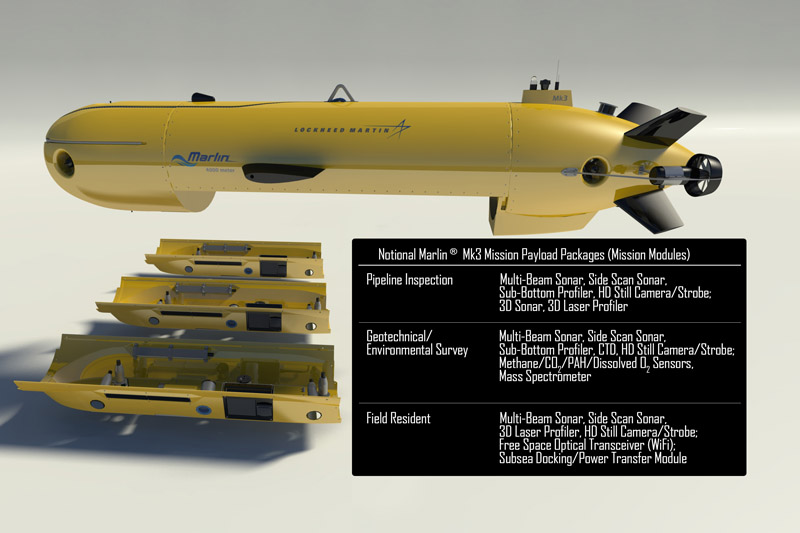
The Marlin® Mk3’s interchangeable payload module will enable it to perform a wide range of inspection, repair, and maintenance (IRM) missions using both current and future technologies. Near-term missions will include bathymetric and geophysical survey, subsea facility inspection and monitoring, pipeline and riser inspection, and hydrocarbon seep detection. In the future, high bandwidth wireless subsea comms, subsea docking technologies, and long-term submersion technologies will enable such capabilities as field resident structural integrity monitoring and light intervention (robotic tool manipulation) cleaning and maintenance activities.
Over time, AUVs will ultimately achieve significant improvements in safety and operating efficiencies as well as dramatic reductions in cost over current inspection methods. The path to achieving this vision, however, will include many small, incremental steps as AUV technologies mature, become accepted in deepwater fields and are adopted by operating companies as valuable inspection tools. The Marlin Mk3 offers a unique combination of innovative, leading-edge capabilities and critical modularity and growth capacity that will enable continuous expansion of the value proposition for AUV-based structural integrity management for deepwater fields.