A New Era OF Subsea IMR
Chris Gilson
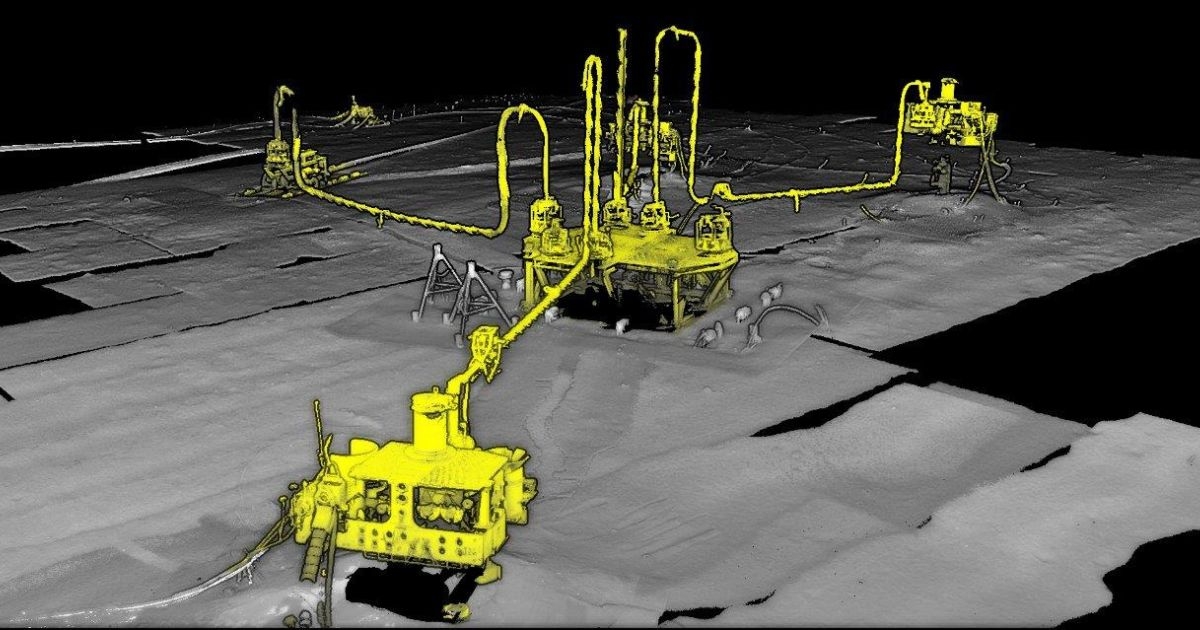
(Image credit: Voyis)
The methodologies in performing subsea inspection, maintenance, and repair (IMR) services are ever evolving, with new and innovative technologies rapidly advancing the capabilities of what is possible in the underwater domain.
Surveyors are continuously looking for new ways to complete traditional survey approaches that both improve the efficiency of the operations by making the most of subsea robotics systems as well as optimize the data output in supporting predictive maintenance on subsea assets. In order to capitalize on this trend, there is a strong impetus towards increased sensor data resolution and providing real-time feedback.
STREAMLINING INSPECTIONS WITH ROBOTICS
Robotics systems are becoming more capable of performing critical subsea inspections, primarily due to the increased performance of subsea sensors and the current drive to innovate in the market. The global pandemic has forced leading surveyors to change how they approach offshore operations. With the demand for social distancing, the industry has had to adapt by drastically innovating in remote operations; this is the driving factor for pushing further into an uncrewed survey.
Another key driver of this trend is the emergence of the offshore renewables market and the focus shifting to greener energy production. Survey companies look to match the mission of reducing their carbon footprint and increasing inspection efficiency. Companies like Ocean Infinity with Armada, Oceaneering with Freedom, and Nauticus with the Aquanaut are pushing the boundaries of autonomy, driving some of the most prominent innovations in the market for enabling robotics systems to perform critical inspection missions autonomously. In order to allow these systems to be successful with this mission, the vehicle will demand greater detail and instantaneous results from the sensors onboard to enable automation.
ENABLING AUTONOMY WITH OPTICAL SYSTEMS
Voyis' contribution to this shift in the industry has been to provide substantially improved subsea optical systems with extremely high-resolution datasets processed in real-time to guide the robotic system or enable the vehicle to see the depths like we see the surface. Traditionally, subsea surveys relied on sonar and low-resolution video, which were only processed and analyzed after the survey was complete.
These lower resolution sensor packages required intense scrutiny and interpretation from surveyors, which led to inefficiencies and solely relied on human intervention. Inherently, optical sensors designed for subsea surveys, such as laser scanners with harmonized 4K stills cameras, have extremely high-resolution outputs that provide confidence in qualitative and quantitative subsea environments' data sets.
Furthermore, Voyis has introduced additional advancements in data improvements by removing noise and applying advanced filtering algorithms to laser point cloud data in real-time. Simultaneously, images from the stills camera are instantly enhanced using techniques to improve light levelling, undistortion, and applying machine learning-based true color correction. These advancements are all in an effort to provide the best possible data set available immediately, supporting reliable unsupervised decision making from the subsea robotic system.
It is paramount that subsea vehicles receive the highest quality datasets onboard to ensure critical missions, such as vehicle station keeping for localized inspections, object or structure tracking, manipulation for intervention or repair, subsea guidance or docking, are successful.
These optical sensors can further aid in improving the localization of the subsea vehicle by correcting drift seen through the navigation data over large area surveys, such as a subsea oil field. Provided the laser data is supplied to the robotic system in real-time and fully corrected, definitive features of the seabed can be used as a reference to dictate the vehicle's location. Over time and subsequent passes, the same feature may be exposed to the navigational drift prevalent with subsea positioning systems, resulting in data misalignment. Using laser-based loop closure, features can be extracted from the high-resolution model and be used to correct the error. Improving subsea navigation is essential in aiding fully autonomous robotic systems while also ensuring the as-built datasets collected throughout the survey are made with the highest accuracy.
PREDICTIVE MAINTENANCE: GENERATING A DIGITAL TWIN
While optical systems are a core element in enabling subsea automation, there is a supplemental benefit in using these sensors for IMR surveys. The higher-resolution datasets that enable robotic systems are also used to offer certainty for asset failure mitigation while allowing clients to make informed decisions on safely extending the service life of their assets.
One of the most critical elements of understanding the state of a subsea asset is determining the physical site condition of the structure and surrounding environment to ensure there are no potential threats to the integrity of the asset. Using underwater laser scanners, as-built volumetric models of the structure, seabed, and any relevant areas of interest are captured with extreme detail and accuracy.
These digital models can support predictive maintenance by monitoring change in the 3D model over subsequent scans using highly accurate heightmaps of scour geometry, volume of anodes, size of corrosion/marine fouling, or structure positioning shifts.
Provided the datasets are accurately geo-referenced, the analysis of inspection data can be further optimized throughout the survey. Machine learning software, like EIVA's Deep Learning, is beneficial for streamlining survey reporting by flagging areas of interest throughout a survey based on a model developed from a database. Improving the resolution and quality of the input datasets allows the software to detect features with much greater confidence.
In addition, with high-quality real-time datasets collected fully geo-referenced, the results are easy to compare with historical scans of the same asset.
Coupling the external model field condition with interdependent sensor datasets installed on the subsea asset can offer a complete digital twin to satisfy a replicated monitoring tool to determine the health of all core components.
THE FUTURE OF INSPECTION SURVEYS
As autonomy continues to improve, with sensor and robotic systems working effectively in tandem, the next step to further optimize subsea assets' inspection and maintenance regime is to fully adopt autonomous inspections either through uncrewed surface vessels deploying robotic systems or through subsea residency. Today, there is an evident push in the market to make this a reality. However, there is still a long way to go, and optical systems are doing their part to support this cause.
Once the fully uncrewed operation is accepted, the next path is leveraging smaller solutions to drive costs down further and reduce survey carbon output.
These systems will require sensor providers to adapt and ensure that the same capabilities available on the larger vehicles are made possible for smaller platforms. Voyis intends to address this trend by developing turn-key solutions for modular AUVs and inspection class ROVs that adapt to smaller platforms without limiting the performance of the optical package.
For more information, visit: www.voyis.com.
This feature originally appeared in Ocean News & Technology's Magazine May 2022 edition—Subsea IMR Technology. To read more, access the magazine here.